◆ Products
HARDWARE
30+
min hover flight time
10–15 min show time





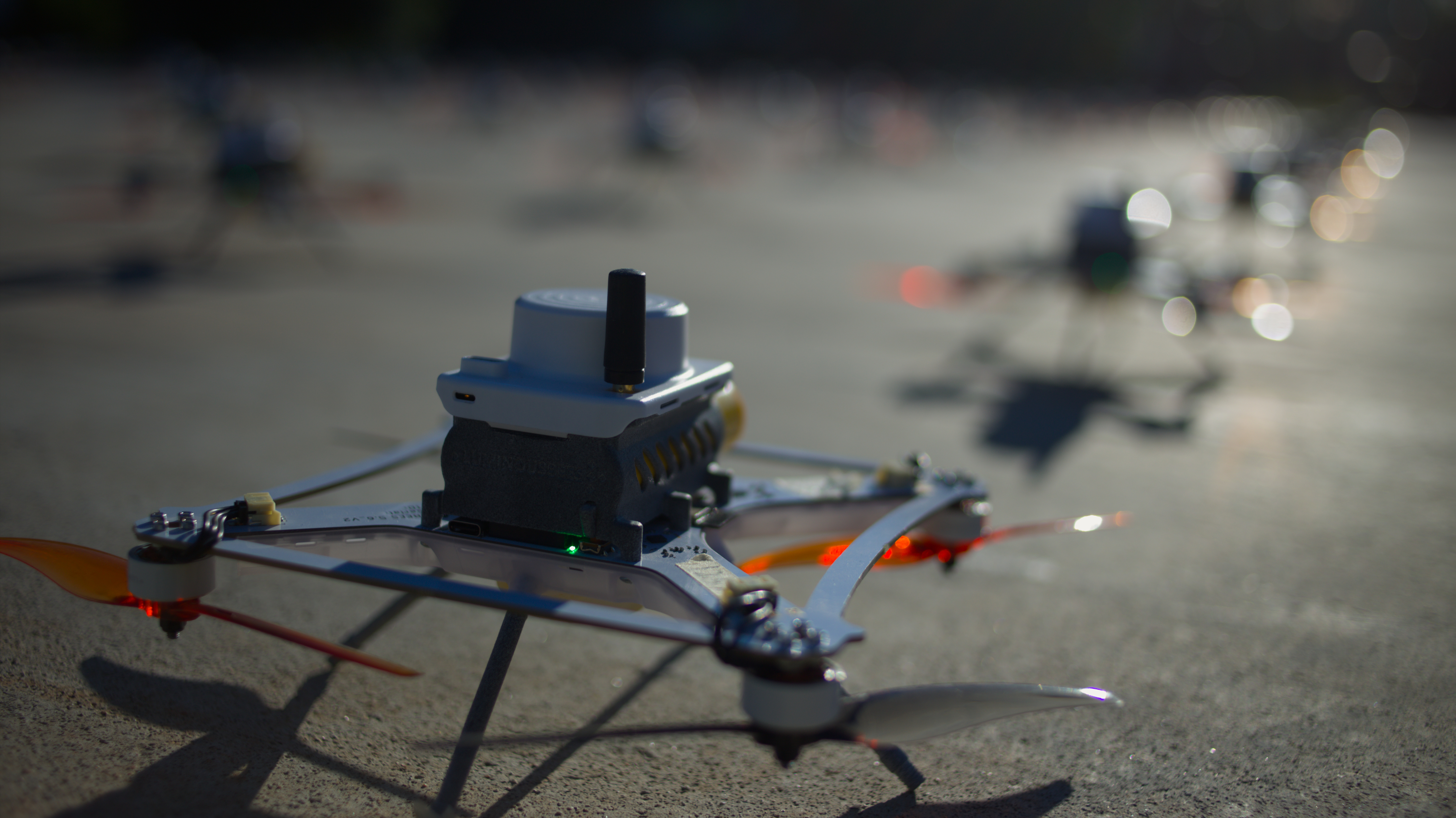
LUMINOUSBEE OUTDOOR
The outdoor show drone. Best 5" class quadcopter.
◆
30+ min hover flight time (2x 21700 5000mAh)
◆
10–15 min show time (movement + lights)
◆
RTK GNSS multi-band (ublox ZED-F9P) for centimeter precision
◆
H7 MCU flight control with solid-state SD card
◆
Integrated Single PCB Design
◆
BlHeli32 ESCs with bidirectional telemetry, DSHOT 1200
◆
Optimized proprietary design proven at work daily
“The entire volume acts as a single luminous body.”
<100
grams with battery
Indoor Drone

MINI-LUMINOUSBEE
The indoor show drone.
◆
Under 100g with battery
◆
3" propellers, 1S Li-Ion power
◆
28 RGBW LEDs on board
◆
H7 processor, BlHeli32 ESCs
◆
WiFi, IMU, Compass, Barometer
◆
Integrated solid-state memory for choreography storage
◆
Safe for close proximity with performers and audiences
3–5
cm precision
UWB System
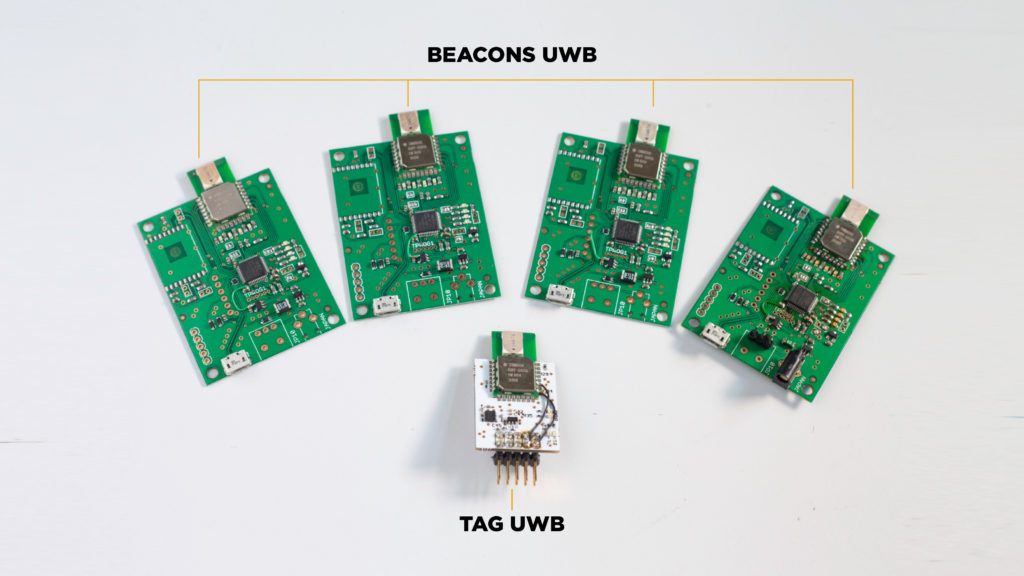
UWB INDOOR POSITIONING
Swarm UltraWideBand indoor localization.
◆
DWM3000-based module
◆
Precision: 3-5cm (tunable)
◆
Tag weight: under 8g
◆
Scalable: no bottleneck on number of trackable objects
◆
Works in non-square rooms, around obstacles
◆
Far less expensive than motion capture systems
◆
Supports Tdoa2 and Tdoa3 modes